Projekty bieżące

🐢 Prototyp podwodnego drona eksploracyjnego „Żółw" z technologią LMB
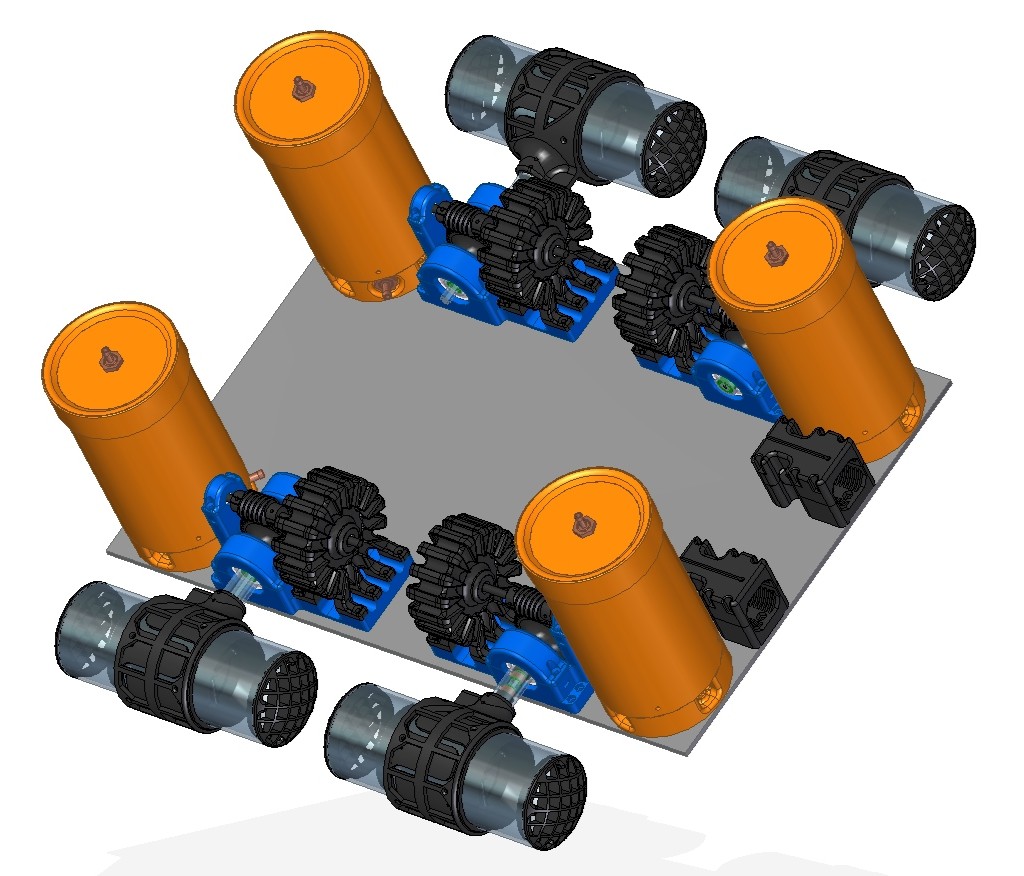
Dron posiada cztery walcowe łapy zdolne do niezależnego obrotu, wyposażone w turbinowe silniki LMB ze śrubami łopatkowymi. Sterowanie odbywa się zdalnie przez pływającą bojkę z anteną GPS. Dron wyposażony jest w chwytak, kolorową kamerę z oświetleniem oraz eksperymentalny sonar LMB do komunikacji podwodnej.
Podstawa to płyta aluminiowa 400×600 mm, skorupa z kompozytu włókna szklanego. Elektronika w szczelnej obudowie z rury poliwęglanowej. Sterowanie radiolinkiem Radiolink AT10 II (12 kanałów), podgląd FPV na żywo.
Do poruszania po lądzie służą cztery łapy napędzane silnikami krokowymi LMB. Zmiana wyporności realizowana przez 4 zbiorniki gazowe. Woda opływająca silniki pełni funkcję chłodzenia uzwojeń.

🦾 Bioniczna proteza dłoni – egzoszkielet
Prototyp bionicznej protezy dłoni z wydruku 3D z niezależnym ruchem wszystkich palców. Sterowanie sygnałami EMG lub zdalnie.
Projekt integruje konstrukcję mechaniczną, elektronikę sterującą i programowanie mikrokontrolera – przykład kompleksowego podejścia do biomechatroniki.

⚡ Wyrzutnia elektromagnetyczna (moździerz)
Eksperymentalna wyrzutnia strzelająca kulkami drukowanymi z filamentu. Pozycjonowanie poprzez obrót podstawy (podwójne łożysko kulkowe własnej konstrukcji) oraz regulację kąta strzału z blokadą pozycji.
Zasada działania opiera się na zjawisku LMB – tłok magnetyczny współpracuje z siedmioma nawiniętymi cewkami i czujnikami hallotronowymi. Mikrokontroler ESP-32, zasilanie 2× akumulator 12 V/5 Ah.
Tłok opada grawitacyjnie, jest przyspieszany przez cewki, a magnes odpychający na dole lufy odwraca kierunek ruchu – pocisk zostaje wystrzelony siłą bezwładności ku górze.

🔄 Przewijak szpul z filamentem do druku 3D
Urządzenie do łączenia i nawijania resztek filamentu z wielu szpul na jedną, z automatyczną kontrolą ilości filamentu i nawijaniem zwój przy zwoju.
Podstawa z płyt wiórowych, napęd dwufazowym silnikiem LMB z przekładnią zębatą 1:5. Mechanizm pozycjonera z silnikiem krokowym CNC, przekładnią ślimakową, prowadnikiem z teflonową rurką i licznikiem długości z czujnikiem hallotronowym.
Na górze zamocowana zgrzewarka Sunlu do filamentu. Sterowanie: mikrokontroler ESP-32, dwa mostki H, wyświetlacz ilości filamentu, zasilacz 12 V/5 A.
Projekty zrealizowane
Wybrane konstrukcje opracowane przez koło ELMECH od 2008 roku.
🔍 Inspektor 1 – robot inspekcyjno-czyszczący
Zdalnie sterowany robot mobilny do kanałów wentylacyjnych z kolorową kamerą, dwoma źródłami światła (LED + halogen), 3-osiowym ruchomym ramieniem z chwytakiem oraz wysuwanym teleskopowo kołem pionowym zwiększającym przyczepność do ścian kanału.
🚁 Dron – Kwadrowiec
Latający robot obserwacyjny na lekkich aluminiowych profilach z czterema silnikami bezszczotkowymi i kamerą. Ogniwa fotowoltaiczne jako źródło zasilania LED i urządzeń peryferyjnych – dwa niezależne układy zasilania.
🚤 Poduszkowiec
Zdalnie sterowany model poduszkowca transportowego (udźwig 1,5 kg). Dwa silniki bezszczotkowe: napęd + poduszka powietrzna. Kadłub ze styropianu w kształcie odwróconego pontonu dla stabilności w zakrętach.
❄️ System „Kolce"
Awaryjny system bezpieczeństwa dla pojazdów na oblodzonej nawierzchni. Cztery tarcze z 54 hartowanymi kolcami każda, montowane do kół samochodu – wysuwany zewnętrzny obwód wbija kolce w lód przywracając przyczepność.